







arrow_upward
Más sobre temperatura y reflectancia
- 24/6/22 0:00
- INTA Copernicus Relay
En la entrada anterior planteamos el reto de la modelización de la temperatura de la superficie terrestre a partir de su reflectancia, y hoy os mostramos un pequeño ejercicio realizado por nosotros sobre este tema. Para analizar las limitaciones de esta técnica, hemos utilizado datos adquiridos por el INTA con el sensor aeroportado AHS en julio de 2020 sobre la zona de Barrax (Albacete). Hemos obtenido imágenes de temperatura y reflectancia de la superficie siguiendo nuestro procedimiento nominal (basado en ATCOR4) y hemos construido diferentes modelos de regresión Temperatura = f(reflectancia). Para ello hemos usado como variables independientes tanto bandas individuales como índices espectrales (NDVI, NDWI) y, como conjunto de datos, todos los píxeles disponibles con NDVI>0. La valoración de los modelos se resume en esta tabla.

Vemos que todos los modelos tienen un R2 bastante alto, pero también un error de los residuos considerable, mostrando que, para una determinada firma espectral, la temperatura de la superficie está variando bastante. El mejor modelo tanto en valor del coeficiente de regresión como en varianza de los residuos ha sido el que incluye 6 bandas Sentinel-2 (VNIR y SWIR).
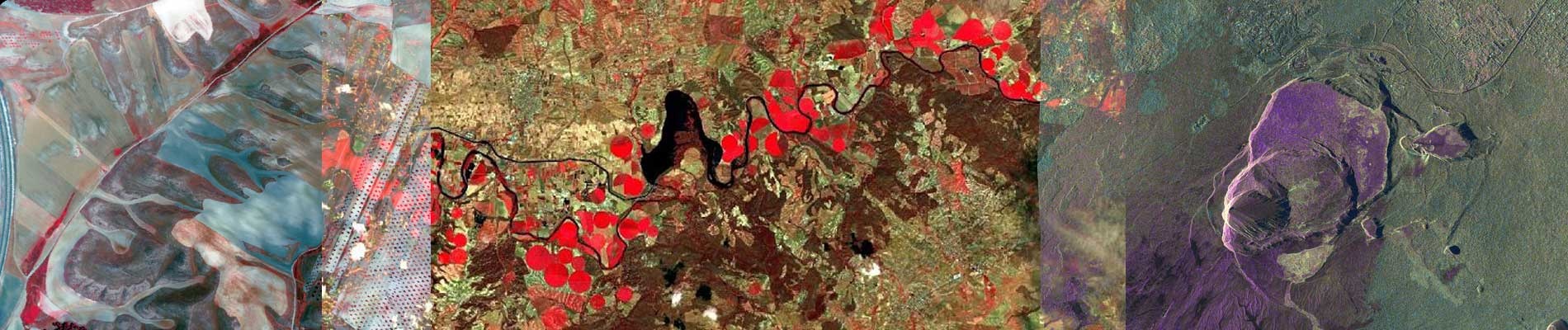
Para observar la distribución geográfica del error, hemos tomado este mejor modelo y lo hemos aplicado a la propia imagen AHS de entrada. En la figura mostramos la diferencia entre la temperatura estimada a partir de la reflectancia y la original (la obtenida directamente de los datos térmicos del AHS), junto a una composición IR color, que facilita reconocer las superficies observadas.


Diferencia de temperatura real-simulada y representación CIR de la reflectancia de la zona de estudio.
Los tonos rojizos en la imagen de diferencias corresponden a píxeles con error en el entorno de ±1 K, que son los predominantes y que muestran un comportamiento aceptable del modelo. Pero hay importantes diferencias en otras zonas. Especialmente, la temperatura real es hasta 6-7 K más fría (colores negros y azules en la imagen de diferencias) en determinadas parcelas. Podría ser que esas parcelas estuvieran recién regadas, de manera que su reflectancia ha cambiado poco, pero la disponibilidad de agua las mantiene más frías que otras superficies de reflectancia parecida; esto es un resultado observado en otros trabajos. Se aprecian otras anomalías en el mismo sentido (predicción demasiado alta) en bordes de cultivos y otras superficies, difíciles de explicar, pero, al menos, localizadas. Las zonas en las que la temperatura real es bastante superior a la del modelo de reflectancias (colores amarillos) corresponden a carreteras, pero también a algunas parcelas agrícolas, donde el fallo en la predicción es más problemático.
En cualquier caso, el error medio observado (2.4 K) es un valor bastante elevado que nos muestra que, incluso en el mejor de los casos (exacta simultaneidad reflectancia-temperatura, en una zona sin relieve, pocas sombras, etc.), es necesario dotar al procedimiento de modelización de temperatura de una mayor complejidad para alcanzar un error compatible con la necesidad de exactitud de los usuarios (típicamente inferior a 1 K).